
🥋 About me
I am a current Research Assistant at the School of Vehicle and Mobility, Tsinghua University, under the mentorship of Prof. Xinyu Zhang and Prof. Jun Li. I earned my B.Eng in Computer Science and Technology from China University of Mining and Technology (CUMTB) in 2023, where I was guided by Prof. Jiajing Li. I also participated in joint training with Tsinghua University from 2022 to 2023.
My research focuses on how 3D vision, Visual Language Models (VLMs), and 3D reconstruction foundation models can be used to build spatial intelligence for autonomous systems. Previously, much of my work has centered on multi-agent traffic scenarios, especially V2X / CAV settings, where the key challenge is to turn heterogeneous observations into a reliable shared spatial representation. My published work has therefore focused on spatio-temporal alignment, calibration, localization, and cooperative perception, while my more recent efforts extend this line toward VLM-based scene understanding and geometry-aware representations.
I am also exploring Agentic AI for the physical world, with a particular interest in improving agents’ long-horizon task capabilities: how agents can reason over 3D/spatial observations, maintain task context, interact with embodied systems, and support decision-making in real-world autonomous scenarios. Alongside this main direction, I use agentic AI to build research-assistance workflows for literature discovery, hypothesis generation, experiment planning, and manuscript iteration, while studying how researchers can collaborate effectively with agents. I see this human-agent research workflow as another important problem for the new era of scientific discovery.
I am actively exploring MPhil/PhD opportunities. Please feel free to reach out.
🦄 Research
- 3D computer vision: Registration/Calibration, Perception, SLAM;
- Autonomous Systems: Cooperative Perception, V2X, Spatial Intelligence;
- Visual Language Models, 3D Reconstruction Foundation Models, and Agentic AI.
🧩 Selected Projects
Focus: Exploring how VLMs/VLAs can support end-to-end autonomous driving, especially the integration of perception, scene reasoning, decision-making, and planning.
Role: I participate in model training and evaluation for end-to-end driving-oriented tasks.
Focus: Cooperative perception and spatial alignment for connected autonomous driving systems.
Role: I contributed to the construction and debugging of a V2X data acquisition platform, assisted real-vehicle cooperative perception data collection, participated in data cleaning and dataset construction, and led research on spatio-temporal alignment for multi-end sensing systems.
Outcomes: T-ITS 2025, IROS 2024 Oral, IoT-J 2025; patent CN119087408A.
Focus: Online extrinsic calibration for vehicle-mounted multi-sensor systems.
Role: I led the development and scenario-specific tuning of the automatic calibration algorithm, assisted real-vehicle data collection and deployment, validated calibration accuracy and stability, and prepared technical quality-inspection reports.
Outcomes: T-IM 2023; patent transfer and application deployment.
📝 Publications
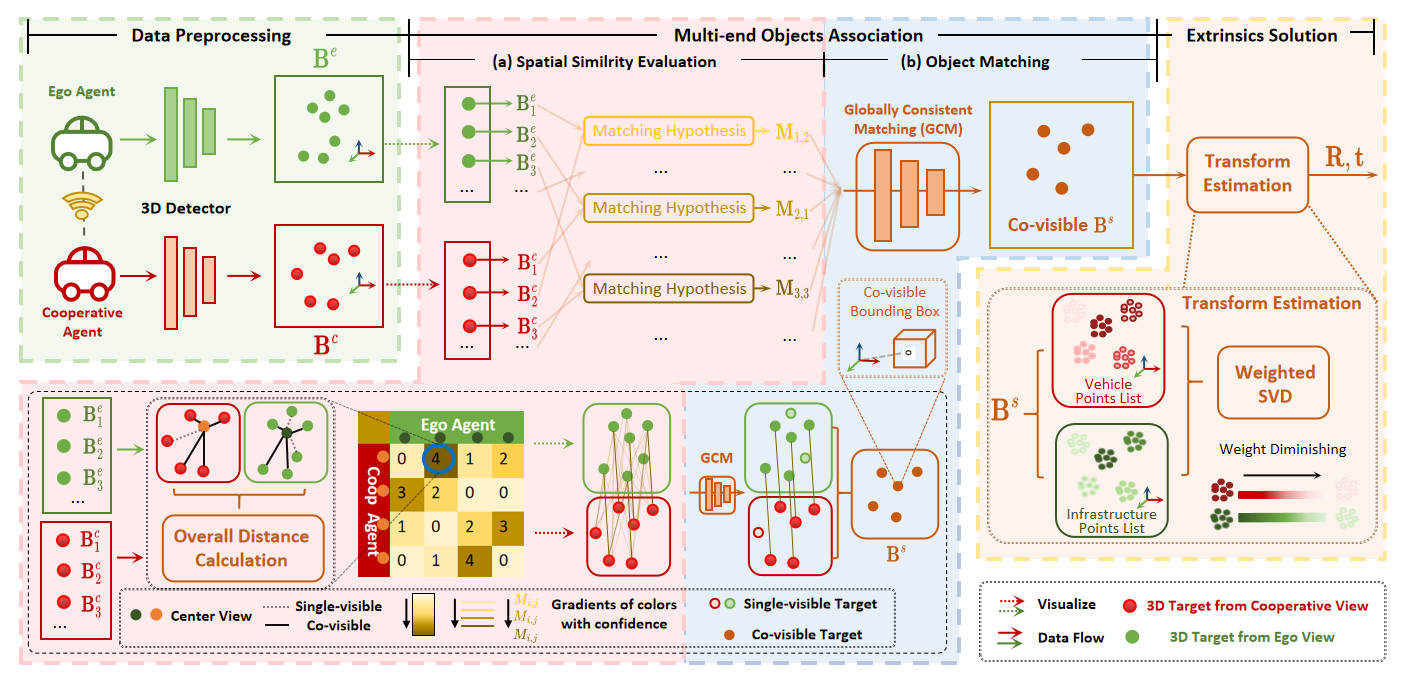
V2X-Reg++: A Real-time Global Registration Method for Multi-End Sensing System in Urban Intersections
Accepted by IEEE Transactions on Intelligent Transportation Systems (T-ITS, JCR Q1, IF:8.4)

tl;dr: We argue that current spatial alignment methods, which require an initial pose, are impractical for real-world Vehicle-to-Everything (V2X) cooperative perception. To address this limitation, we propose an online global registration algorithm that uses perception priors to align heterogeneous sensors in real-time.
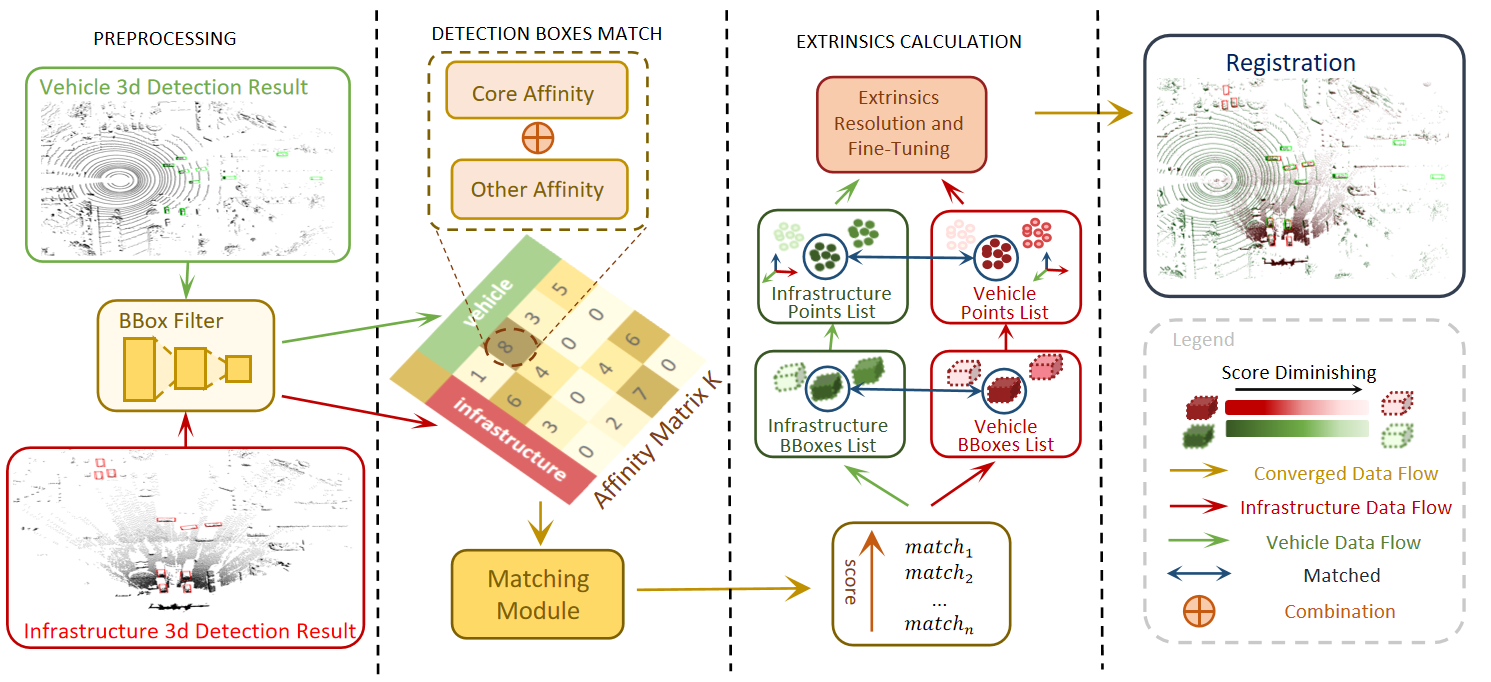
V2I-Calib: A Novel Calibration Approach for Collaborative Vehicle and Infrastructure LiDAR Systems
IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), 2024
tl;dr: We re-examine the evolution of sensor calibration in V2I scenarios, highlighting the shift in demand from static, one-time calibration to dynamic, continuous alignment. We then propose an online, global registration of cross-source point cloud for algorithm for V2I.
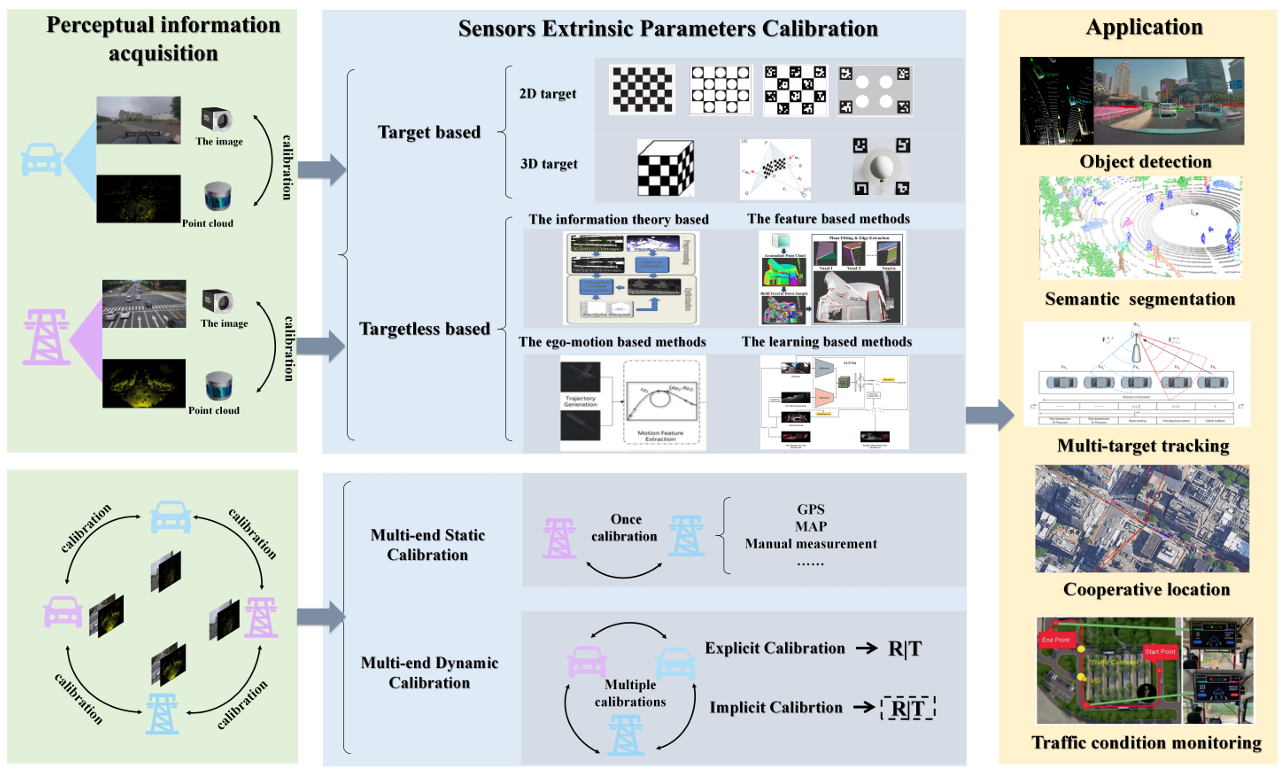
Cooperative Visual-LiDAR Extrinsic Calibration Technology for Intersection Vehicle-Infrastructure: A review
IEEE Internet of Things Journal, 2025 (IoT-J, JCR Q1, IF:8.9)
tl;dr: This survey systematically organizes the evolution of sensor calibration from single-vehicle to cooperative intelligence.
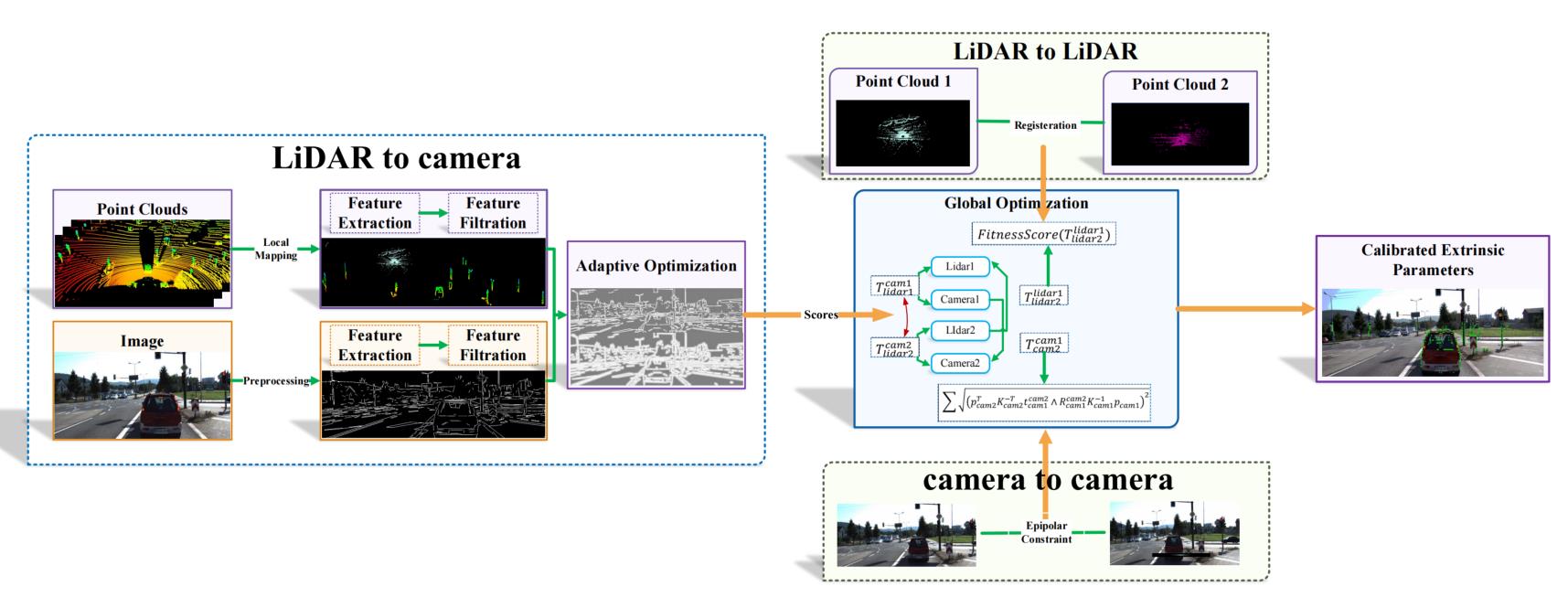
Automated Extrinsic Calibration of Multi-Cameras and LiDAR
IEEE Transactions on Instrumentation and Measurement, 2023 (T-IM, JCR Q1, IF:5.9, Student First Author)

tl;dr: We propose an online, line-feature-based method to address extrinsic parameter drift in Camera-LiDAR systems during operation. Its real-world effectiveness was validated with industry partners (Meituan, MOGOX, and SAIC Motor).
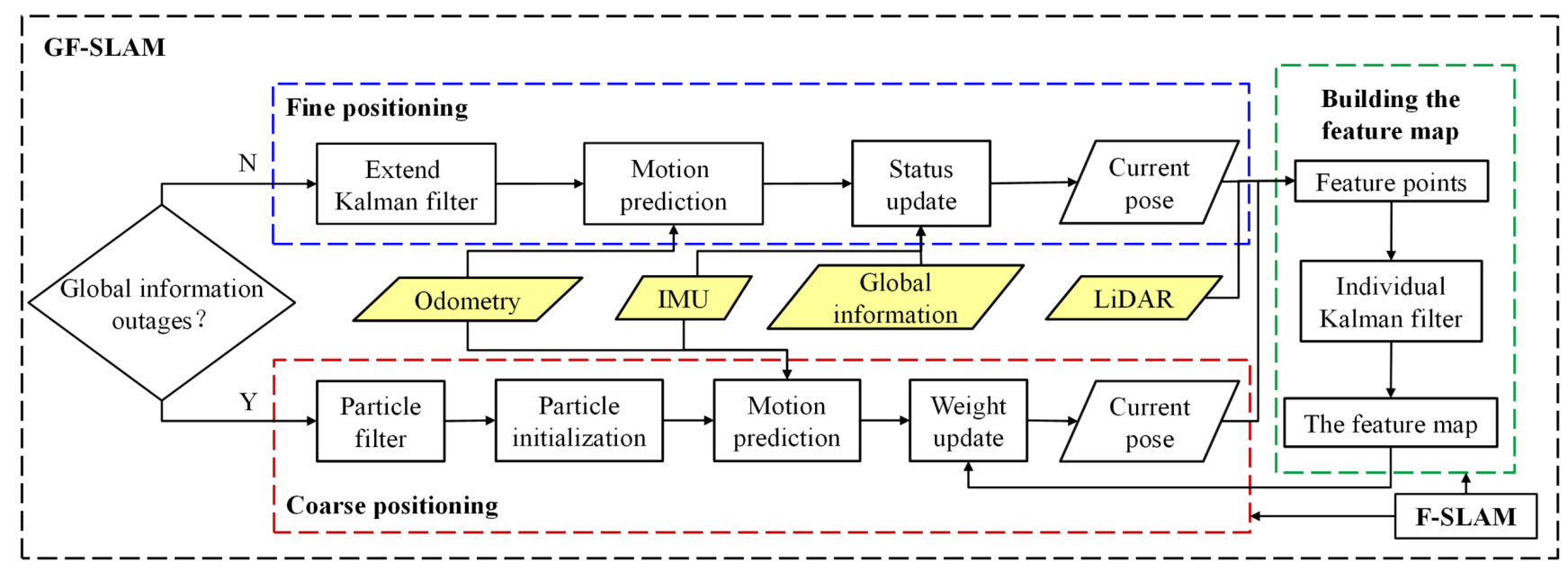
GF-SLAM: A Novel Hybrid Localization Method Incorporating Global and Arc Features
IEEE Transactions on Automation Science and Engineering, 2024(T-ASE, JCR Q1, IF=6.4)
tl;dr: To address cumulative error in mapping for agricultural scenarios, we propose a robot localization method that fuses global and local environmental features. I was responsible for liaising with the Academy of Agricultural Sciences and implementing the real-world validation.